

Human intrigue with technology has long served as material in works of science fiction. Fantastical tales propel mankind into journeys of the unknown, often marked with interplanetary travel, robot invasions, and beings borne out of experiments that transcend biology. These journeys highlight challenging relationships between individuals and society, and encourage the exploration of extraordinary landscapes and thought.
Discoveries in fields of science, technology, engineering, and mathematics (STEM) allow Assistant Professor Dr. Robert Gregg at UT Dallas a means to do just that: improve the lives of amputees in society by merging concepts from humanoid robotics into solutions for physical rehabilitation. At the Erik Jonsson School of Engineering and Computer Science, his team’s goal to advance research in high-performance, “wearable robots” combines several applications of science; not science fiction.
As Director of the Locomotor Control Systems Laboratory, as well as the recipient of the Burrough Wellcome Fund and NIH Director’s New Innovator Award, Dr. Gregg’s team utilizes robot control theory to promote the study of human gait patterns not as functions of time, but as functions of a phase variable. By analyzing the human gait cycle as such, in addition to how joints and muscles function, their team uses mathematical theorems to simplify the manner or style of individual movement.
This is only the beginning of the journey to refining the quality of prosthetic movement.
“Current prosthetics provide limited mobility options for amputees. Balance, power, and natural movement are all challenges.”
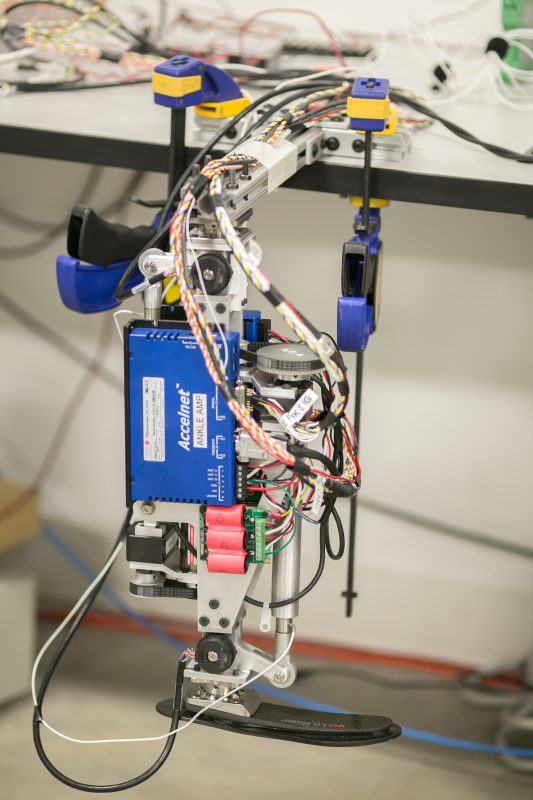
Current prosthetics provide limited mobility options for amputees. Balance, power, and natural movement are all challenges. To achieve balance, an established variable for the center pressure of the foot (CoP), which moves through the gait cycle, is examined in relationship to the changes of the center of gravity (CoG), as it varies in correlation to the individual’s posture.
Due to the variance of muscle conditions, driving power to the prostheses is also an obstacle. Borrowing perspectives from humanoid robotics and software, sensors – inputted with user’s height, weight, and residual thigh dimension – are mathematically placed on prosthetics to assist users in their response to changes in landscape. Powered by motors to simulate muscle and joint force, robotic limb technology can be configured for subjects in approximately fifteen minutes and require less exertion for users than traditional prosthetics; a dramatic benefit from the current rehabilitation process that requires significant time fine-tuning prosthetics to individuals.
Future developments for Dr. Gregg’s team will explore neuro-prostheses currently in development and approaches on leg functions for individuals who have suffered from spinal cord injury or stroke.
Sounds like science fiction, right?
Outside of the office, Dr. Gregg is no stranger to a second set of feet. He enjoys lacing up skates for ice hockey, as well as watching his favorite teams – Angels baseball, Ducks hockey, and Cal football. Along with his wife, Kristin L. Drogos, senior lecturer of Emerging Media and Communication at the University of Texas at Dallas, Dr. Gregg also dedicates time to his dog, Oskee.
In science fiction terms, “Go-Go-Gadget Legs”.
You must be logged in to post a comment.